
 Январь 22nd, 2013
Январь 22nd, 2013  Aviaclub
Aviaclub 
Мультикоптер с комплектом FPV оборудования для полетов по камере. Изначально летательный аппарат будет использоваться для тренировочных полетов, а после наработки полетных навыков владелец планирует установить стабилизированный подвес с цифровой зеркалкой и применять мультикоптер в профессиональных целях. Такой подход позволит избежать лишних финансовых потерь, связанных с недостатком опыта у пилота.
Требования заказчика:
- радиус применения мультиротора до 1500 м;
- управление аппаратом от первого лица, вывод информации на видео очки;
- передача полного набора телеметрических данных;
- возможность установки аппаратуры для профессиональной аэросъемки
Реализация проекта:
- Рама мультикоптера. Для сборки мы выбрали карбоновую раму для постройки профессионального гексакоптера S-6PRO. Выбор шести-лучевой схемы не случаен, она дает возможность приземлить тяжелый мультиротор даже в случае отказа одного из моторов, ведь цена падения аппарата с установленным на борту фотоаппаратом приличного уровня может оказаться запредельной. Конструкция рамы легкая, но достаточно прочная. Не самый простой в сборке комплект.
- Винтомоторная группа и батареи. На мультиротор установлены моторы HL 42-25 kV610 под четырех-баночное питание и воздушные винты APC 14×4.7″. Винты предварительно отбалансированы для уменьшения вибрации. В качестве ходовых Lipo аккумуляторов использована спарка Rhino 4S 4900 mAh, таким образом запас бортового питания составляет 9,8 Ah, это позволит обеспечить достаточное полетное время для выполнения требований клиента к дальности полета.

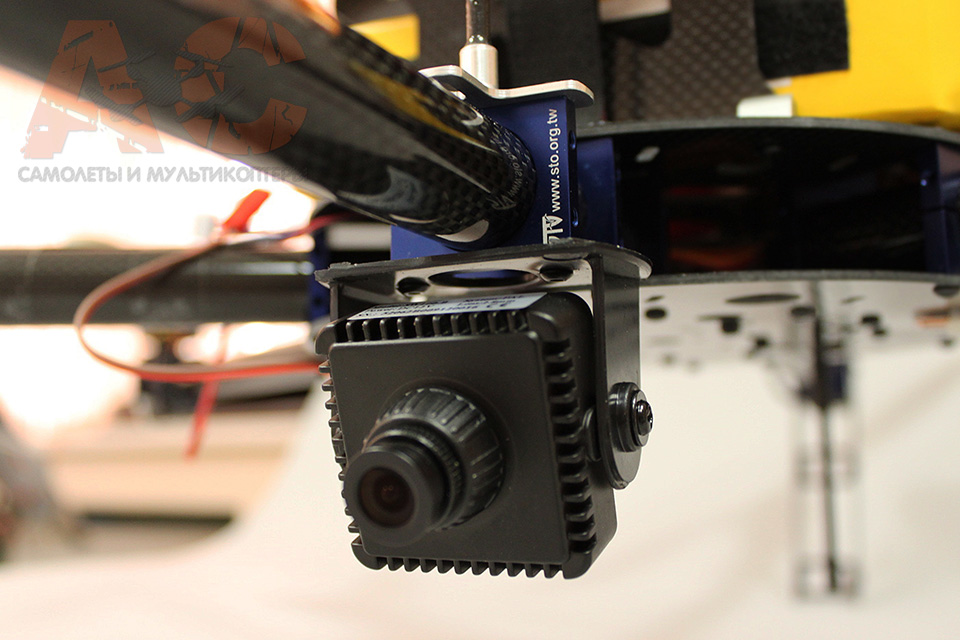
- Комплект FPV оборудования. Полетная камера SeaWolf Pixim 690TVL установлена на один из лучей мультикоптера и подключена через модуль телеметрии OSD Cyclops к трансмиттеру 1.2 GHz с выходной мощностью 800 mW, что позволяет обеспечивать уверенную передачу видеосигнала на значительном расстоянии. Система телеметрии оснащена GPS-датчиком и позволяет пилоту гексакоптера получать всю необходимую информацию: шкалу компаса, направление на дом, удаление мультикоптера от точки старта, полетное время, вертикальную и горизонтальную скорость, заряд ходового аккумулятора и аккумулятора питающего камеру и OSD, мгновенное токопотребление и т.п. На земле видеосигнал поступает через приемник на видео очки FatShark Base Edition.
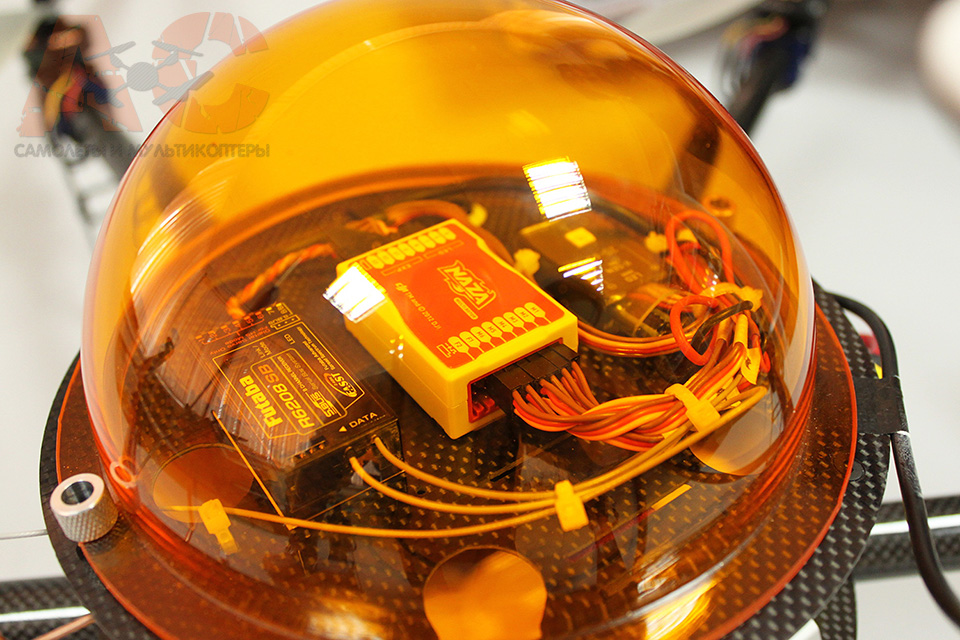

- Полетный контроллер. Для реализации технического задания наиболее подходящим решением стал контроллер DJI Naza M, он позволяет не только стабилизировать полет мультикоптера, но и управлять стабилизацией подвеса для камеры по двум осям. В случае, если в дальнейшем заказчик решит устанавливать не 2-х, а 3-х осевой подвес, нам придется дополнительно монтировать устройство для стабилизации подвеса мультикоптера по 3-м осям.
- Аппаратура радиоуправления. Для данного проекта выбрана радиоаппаратура Futaba 8FG Super с 8-канальным приемником с поддержкой цифровой шины S-Bus, такое решение помогает существенно уменьшить клубок проводов при сборке мультикоптера и обеспечить качественную передачу сигнала
Видео облета гексакоптера с инструкцией по калибровке контроллера DJI Naza M
 Опубликовано в:
Опубликовано в:  Метки:
Метки: